The tracking system is calibrated so it sends position and rotation data of the physical camera or object relative to the studio origin* into the Editor.
Physical camera > "PixotopeTrackedCamera" in the Editor
Studio origin > "CameraRoot" in the Editor (yellow cone)
The studio origin is a defined and marked point in your studio. It is practical to make that a point visible to the camera. For multi-camera setups, it is useful to use the same point for all cameras.
For advanced tracking systems
Advanced tracking systems will already give you position and rotation relative to a defined studio origin. For these systems, we suggest doing the tracking calibration on the tracking system itself.
If you need technical support in calibrating the tracking system, please contact the vendor of your camera tracking system.
For simple tracking systems
Simple tracking systems provide only parts of the data, for example only rotation data for a PTZ camera. In this case, use the tracking panel to manually offset the tracking data so that you end up getting position and rotation data relative to the studio origin. This data offset is applied in the Tracking Server.
Check camera tracking
-
Define and mark your studio origin
-
In the Editor: check that "CameraRoot" is 0,0,0
-
In the Editor: place a calibration cone at the CameraRoot
-
The marked point on stage and the calibration cone should match up
-
-
Move the camera to the outer sides of the field of view and see whether the marked point and calibration cone still match up (disregard time slipping)

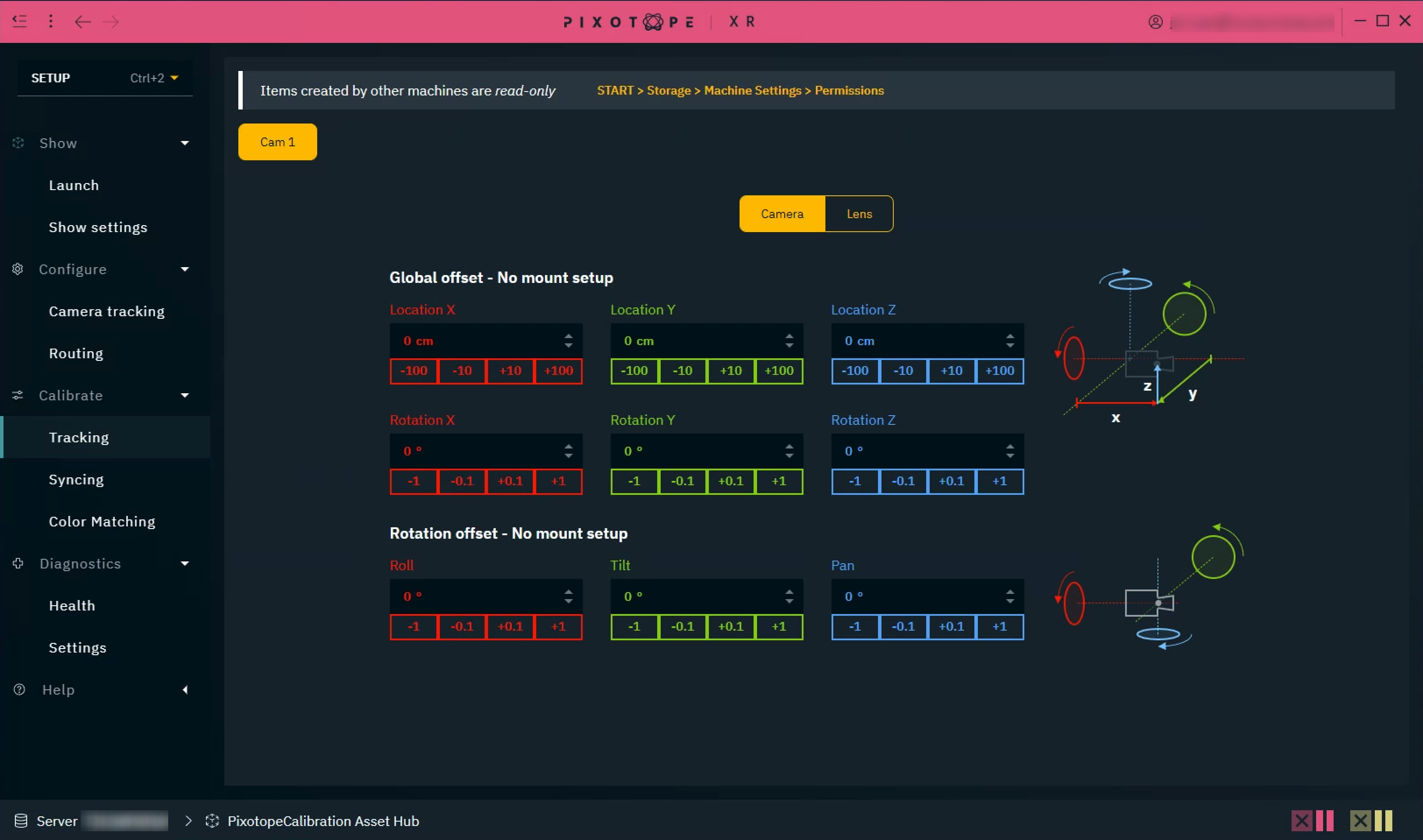
Camera
Depending on the selected camera mount, different offset options are provided:
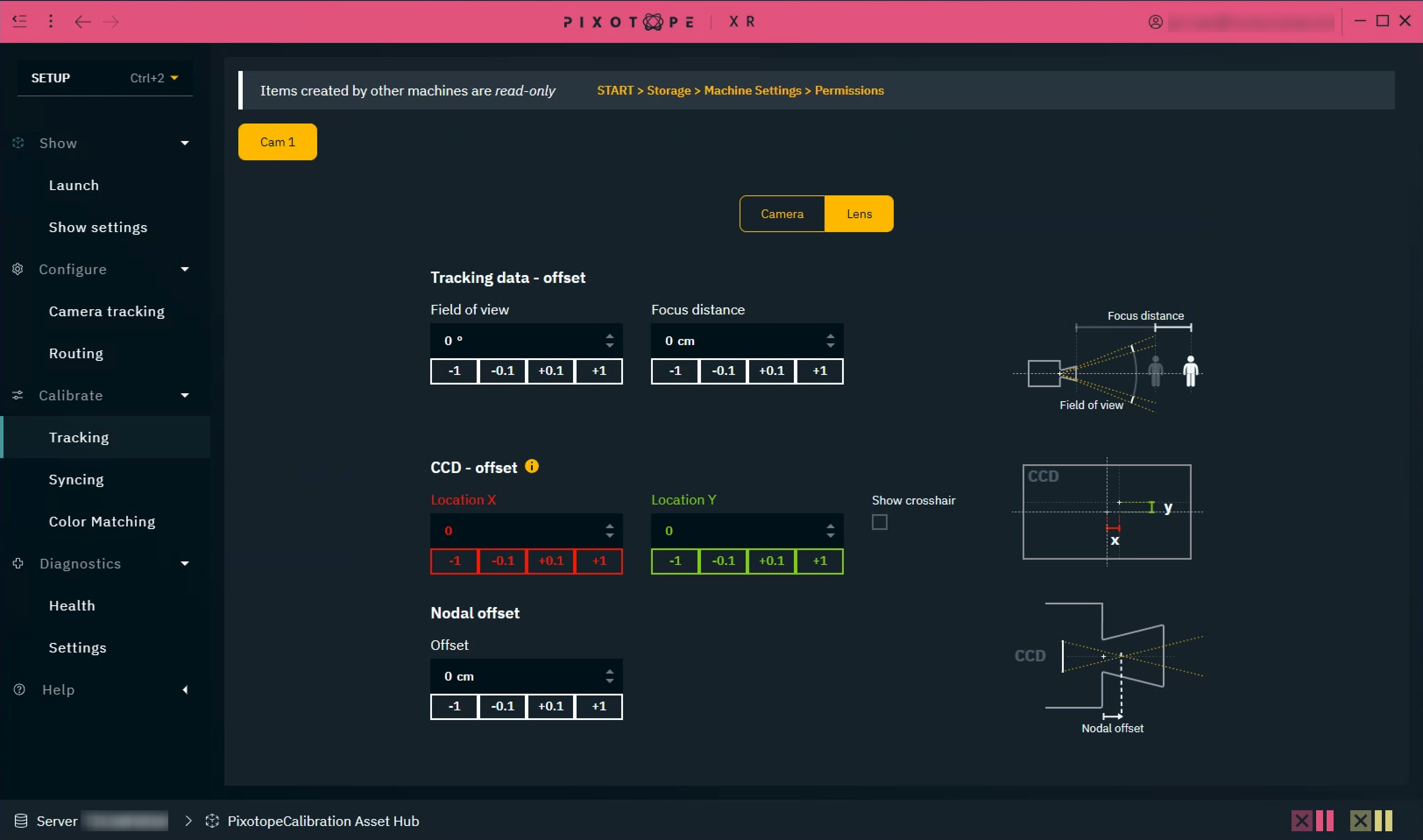
Lens
Defining our coordinate system
When the camera is level, it is very important to verify that the tracking system is sending 0 for tilt and roll. If not, you should reset or zero out the tracking system. If that is not possible, apply offsets in the Pixotope Director until the resulting values for tilt and roll are zero. You can then be sure that both the real and virtual cameras are level. If levelling the camera is not possible, use a digital level and verify that the tracking data contains the correct angle values for tilt and roll.
Next, we zero out the pan value of the tracking in the direction we want to use as “forward”, or the X-axis in Pixotope.