IO.Bot is a multi-platform software developed by XD motion allowing to manage robotic cameras and PTZs.
Learn more about → https://www.xd-motion.com/
Set up IO.Bot connection
-
Configure the IO.Bot server IP address in Director > Setup > Machine and wait for the “Connection successful” notification
IO.Bot must run its REST API server in the same network as Pixotope. Please contact XD motion for details.
Create presets and trajectories
For information on how to create presets for robotic cameras or PTZs, please refer to XD motion’s documentation.
Supported preset types
|
Type |
Supported calls |
|---|---|
|
Position |
|
|
Trajectory |
|
Trigger presets from Control panel
The current setup involves API call triggers. An example setup can be checked out in the attached control panel.
Launch IOBot test panel
-
Download the control panel below and copy it to
[Project folder]/ControlPanels/
OR Create a new control panel and import the control panel below from the top toolbar -
Launch panel in Director
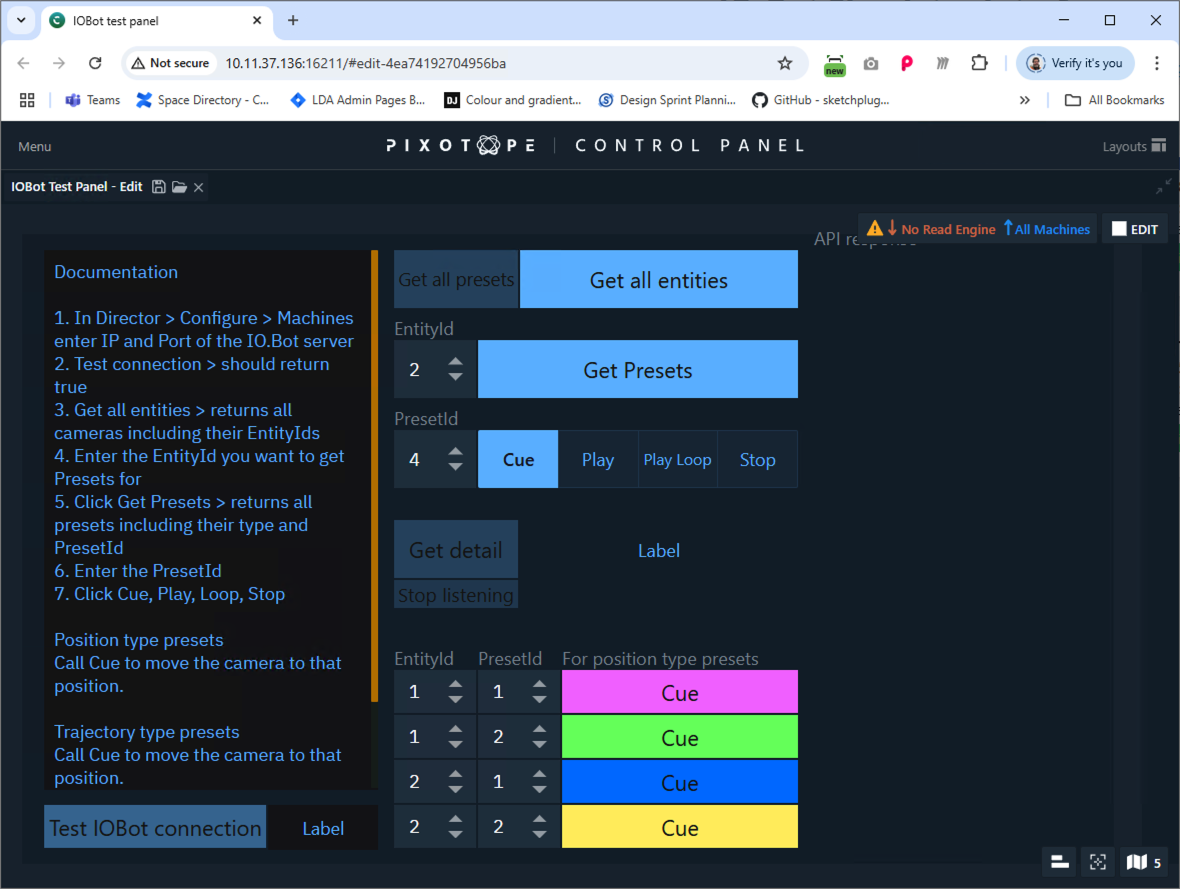
IOBot test panel documentation
-
In Director > Configure > Machines enter IP and Port of the IO.Bot server
-
Click Test connection > should return true
-
Click Get all entities > returns all cameras including their EntityIds
-
Enter the EntityId you want to get Presets for
-
Click Get Presets > returns all presets including their type and PresetId
-
Enter the PresetId
-
Click Cue, Play, Loop, Stop
On the bottom you can find some linked buttons for Position Presets.
-
Enter the cameras EntityId
-
Enter the position presets PresetId
-
Click "Cue" to move the camera to the specified position