For post production workflows or just for “offline” testing, Pixotope offers the ability to record tracking data based on video timecode.
How it works
When recording camera tracking is started, the camera tracking data is saved together with the video timecode. In playback mode, the same tracking data is reapplied if it finds the same video timecode coming in from a video playback source.
Requirements
A device which allows recording and playing back video with embedded timecode.
The timecode used for the recording should be a continuous, synchronous “time-of-day” timecode, rather than a specific asynchronous timecode such as is used for triggering an event. The aim is for recorded timecode for tracking to be unique within any 24 hour period. This allows the system to automatically match incoming timecode to any recorded tracking data for any specific day.
How to record tracking data
Via the control panel
-
Download the control panel below and copy it to
[Project folder]/Content/
OR Create a new control panel and import the control panel below from the top toolbar -
Launch panel in Director
-
Click START RECORDING to start saving the tracking data from any of the Calibration project’s levels - See "Location of recorded tracking data" below

OR create one yourself
-
Launch a level
-
Create a new control panel from the top right of any Launch panel in Director
-
Go to the Engine tab on top of the control panel side menu, and select the WorldSettings actor
-
Drag and drop "Record Camera Tracking Data" and "Use Recorded Tracking Data" from the Properties list
-
Pick widget type (we suggest toggles or tabs)
-
Edit the widget properties in the Widgets tab
-
To read from a custom directory:
-
Drag and drop “Use Today’s Directory” as a toggle or tab widget from Engine > Properties
-
Drag and drop “Tracking Recording Source” as a text widget from Engine > Properties
-
Set custom directory file path
-
Learn more about Creating a control panel - PRODUCTION
Via the Editor
-
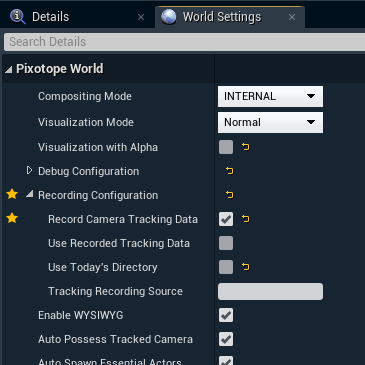
Go to World Settings > Pixotope World > Recording Configuration
-
Enable "Record Camera Tracking Data" to save the tracking data - See "Location of recorded tracking data" below
Location of recorded tracking data
The tracking data is saved to .ptrk files in today’s directory within the current project on the local machine.
[Project folder]/Saved/RecordedTracking/[Computer name]/[Date(YYYY.MM.DD)]
There is currently no way to change this location.
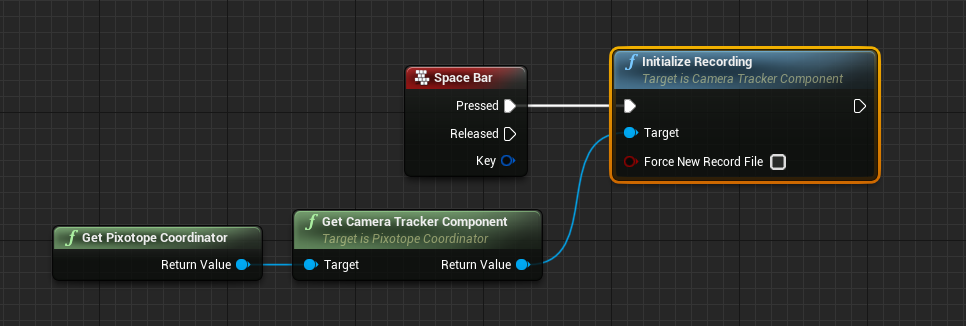
Forcing a new record file
It is possible to force recording to a new recording file with event CameraTrackerComponent::InitializeRecording with parameter Force New Record File = true. This allows splitting a days recording into smaller record files without losing data. It should be possible to expose this to an event triggered by Director.
How to play back recorded tracking data
Via the control panel
-
See above
Via the Editor
-
Specify which directory the recorded tracking data should be read from:
-
Use Today’s Directory (default selection)
-
Use Custom Directory
-
point to a directory or specific file
-
enter an absolute path or relative to
[Project folder]/Saved/RecordedTracking -
for recording in a multi-machine setup use
${MACHINE_NAME}which will be replaced by the local machine name
-
-
-
Enable "Use Recorded Tracking Data" in World Settings > Pixotope World > Recording Configuration
When playing back, tracking data is not recorded regardless of the Record Camera Tracking Data setting.
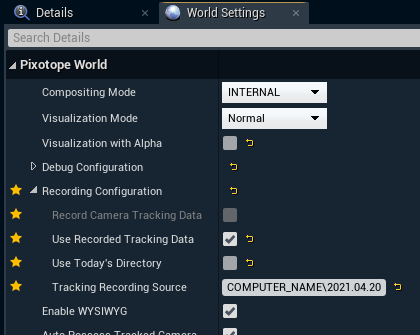
If activated, the option Use Today's Directory overrides the Tracking Recording Source setting to read from whichever directory the current computer would have recorded to today.
Limitations
-
When a video format uses the same timecode for multiple video frames/fields the first reads after starting to play after a pause or jump in video might be incorrect
-
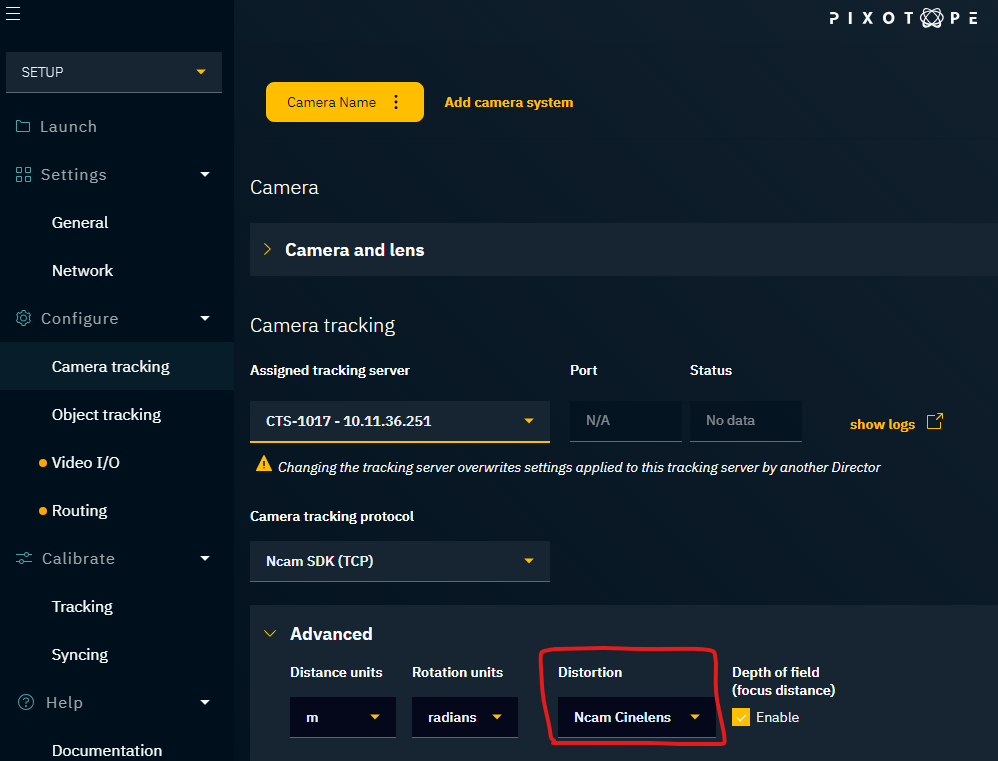
Recording and playback will not work with with distortion model Ncam Map, use Ncam Cinelens instead. This is the default distortion model for Ncam tracking input.